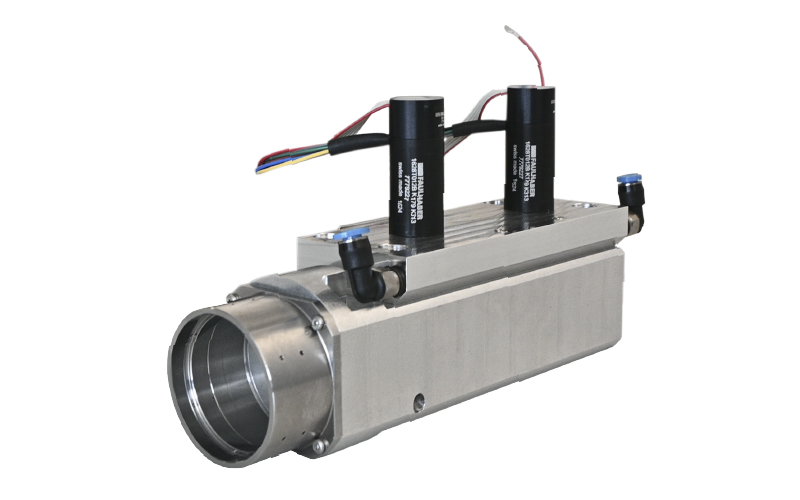
Koaxialer Hochgeschwindigkeits-Linsenaktuator
Der auf der modularen optomechanischen Plattform von MPS Microsystems entwickelte und gefertigte koaxiale Hochgeschwindigkeits-Linesenaktuator liefert mikrometergenaue Ausrichtung in einem kompakten Gehäuse von nur 170 × 87 × 45 mm. Zwei bürstenlose Motoren bewegen Linsenhalter mit Ø 12.7 mm in einer präzisionsgeschliffenen Bohrung und sichern über den gesamten Hub von 3.75 mm perfekte Koaxialität – ganz ohne Unterlegscheiben oder zeitaufwändige Nachjustage.
Das Modul bleibt auch nach Millionen von Zyklen wartungsfrei, weil die in einem geschlossenen Regelkreis geführte Nocke nahezu reibungsfrei läuft, egal ob die Anwendung Laserschneidkopf, Spektrometer oder 3-D-Scanner ist. Hub, Antrieb, Encoder und Befestigungsschnittstellen lassen sich vollständig an Ihre optischen Vorgaben und Platzverhältnisse anpassen.
Max. Hub Z (pro Linse) | 3.75 mm |
Max. Linsendurchschnitt | 12.7 mm (½") |
Bidirektionelle Wiederholgenauigkeit in Z | +/-3 µm |
Präzision Z | 4 µm |
Laterale Wiederholgenauigkeit | +/-1 µm |
Neigungs-Wiederholgenauigkeit eines Linsenhalters | 0.2 μrad |
| Geschwindkgeit | 15 mm/s |

Während andere Systeme Kompromisse erzwingen, vereint dieser Linsenaktuator Tempo und Präzision: Verfahrgeschwindigkeiten bis 15 mm/s bei einer bidirektionalen Z-Wiederholgenauigkeit von ± 3 µm, seitlicher Drift unter ± 1 µm und einer Kippwiederholgenauigkeit unter 0.2 µm. Die Echtzeitregelung korrigiert jede Bewegung, sodass das Linsensystem in Millisekunden scharfstellt, ohne die optische Achse zu verlassen.
Das Ergebnis ist ein System, das schnelle Taktfolgen bewältigt, die Laserpunktqualität wahrt und punktgenau zurückkehrt – die ideale Lösung für Hochleistungssysteme, die weder bei Geschwindigkeit noch bei Genauigkeit Abstriche machen wollen.

Die Technologie von MPS Microsystems basiert auf modularen optomechanischen Antriebsplattformen für eine präzise Positionierung der Linsen entlang verschiedener Achsen: axial (Z-Achse), seitlich (X- und/oder Y-Achse), rotationsbezogen (Tip-Tilt) oder in Kombination. Jede kundenspezifische Lösung ist eine skalierte Anpassung unserer Kerntechnologieplattform, wodurch Entwicklungszeit und -kosten erheblich reduziert werden.
Folgende Komponenten können individuell angepasst werden:
• Auswahl des Motors entsprechend den Anforderungen an Frequenz, Geschwindigkeit und Beschleunigung
• Kugelgewindetrieb oder Nocken-Design sowie Wahl der Kugellager gemäß dem erforderlichen Hub
• Typ des Encoders und Controllers passend zur benötigten Auflösung
• Maßliche Anpassungen für eine perfekte Übereinstimmung mit dem optischen Design
• Adapter für die präzise Positionierung feststehender Linsen
• Bälge für höchste Reinheit