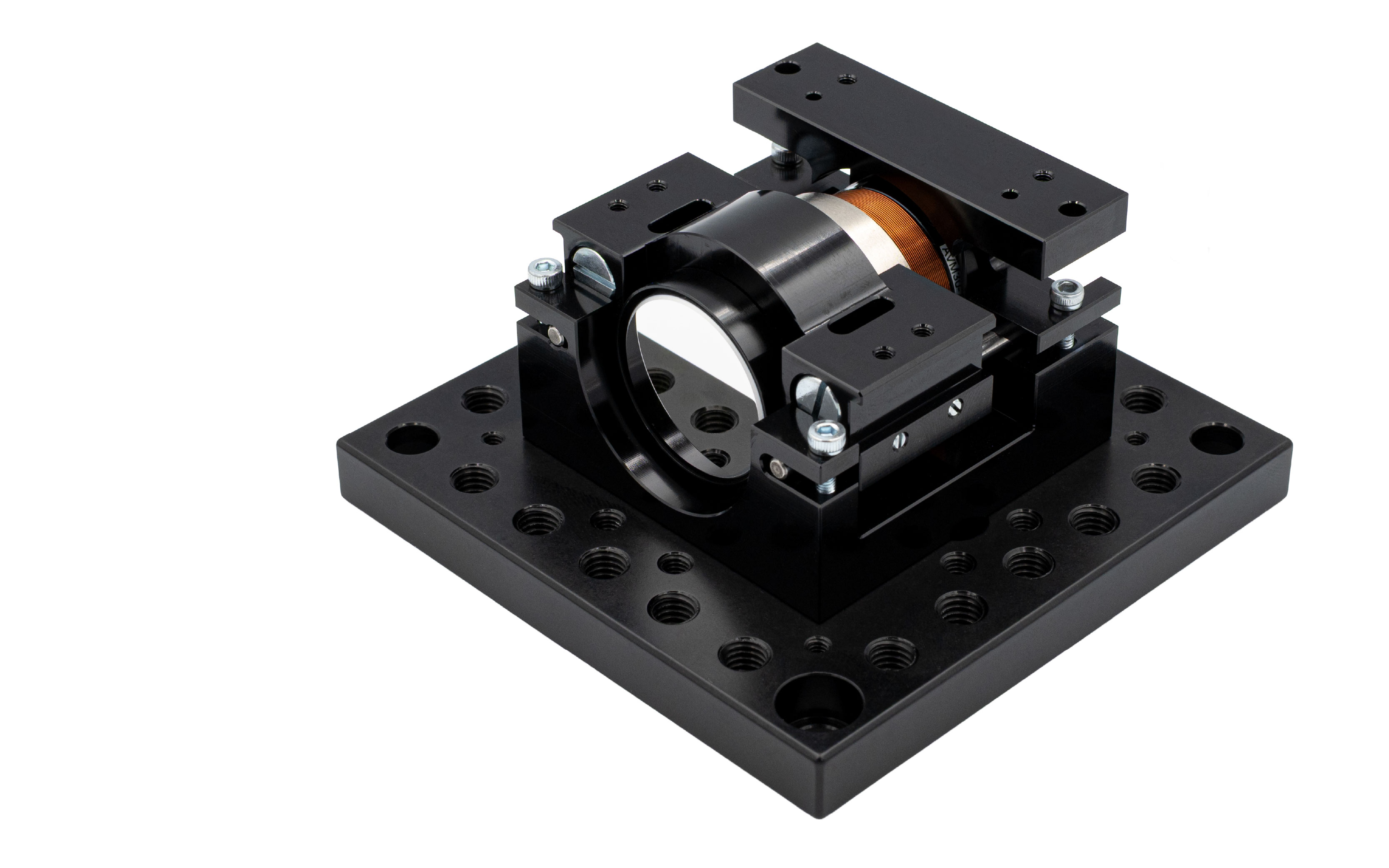
Dynamischer Voice-Coil Nano-Positionierer
Der von MPS Microsystems entwickelte Voice-Coil Nano-Positionierer vereint einen Lorentz-Kraft-Antrieb, Flexurführung und integrierte Elektronik in einem Gehäuse von 65 × 60 × 38 mm. Das werkskalibrierte System wird einbaufertig geliefert und bindet sich über analoge oder digitale Steuerbefehle nahtlos in bestehende Regelungen ein. Der Standardhub beträgt 2.88 mm und lässt sich mit derselben Spule auf 7 mm erweitern, was ideal ist für Mikroskopobjektive, kleine Spiegel und Sensoren, die reibungsfreie Bewegung erfordern.
Die bidirektionale Wiederholgenauigkeit liegt bei ±1 µm über 360 µm Hub und bei ±2.5 µm über den gesamten Fahrweg. Wir passen auf Ihren Wunsch Montageplatten, Objektivklemmen und Kabelabgänge an, sodass dieser Voice-Coil-Aktuator ohne großen Entwicklungsaufwand in kompakte optomechanische Baugruppen integriert werden kann.
Hub Z | 2880 μm (erweiterbar auf 7000 μm) |
Positioniergenauigkeit in Z | 360μm in 10ms: ±1μm / 360μm in 6ms: ±2.5μm |
Minimale inkrementelle Bewegung in Z | 40 nm |
Höchstgeschwindigkeit in Z | 150mm/s |
Maximale Kraft in Z | 24.9 N |
Kontinuierliche Kraft in Z | 5.62 N |
Hohe Schnelligkeit und Präzision in einem kompakten System zu vereinen, ist oft eine grosse Herausforderung. Diese haben wir aber gemeistert.
Der Motor liefert 24.9 N Spitzen- und 5.62 N Dauerkraft, beschleunigt den Positioniertisch auf 150 mm s⁻¹ und bis zu 9 g. Die Closed-Loop-Regelung löst 40 nm Schritte auf; ein 360 µm Sprung liegt nach 10 ms innerhalb von ±1 µm, die komplette 2.88 mm Rückfahrt dauert 20 ms. Damit hält ein Mikroskop die Fokusebene auch bei schnellen XY-Scans, und Metrologieköpfe können Höhenänderungen in Echtzeit ausgleichen.
Trotz der Dynamik dieses Voice-Coil Nano-Positionierers bleibt die laterale Abweichung unter ±1.5 µm, der Winkelfehler unter 70 µrad – entscheidend für stabile Strahlführungen. Bei Verwendung einer Kugelbuchse (anstelle eines Linearkugellagers) sinken diese Werte auf ±1 µm respektive ±30 µrad.

Die Technologie von MPS Microsystems basiert auf modularen optomechanischen Antriebsplattformen für eine präzise Positionierung der Linsen entlang verschiedener Achsen: axial (Z-Achse), seitlich (X- und/oder Y-Achse), rotationsbezogen (Tip-Tilt) oder in Kombination. Jede kundenspezifische Lösung ist eine skalierte Anpassung unserer Kerntechnologieplattform, wodurch Entwicklungszeit und -kosten erheblich reduziert werden.
Folgende Komponenten können individuell angepasst werden:
• Auswahl des Motors entsprechend den Anforderungen an Frequenz, Geschwindigkeit und Beschleunigung
• Kugelgewindetrieb oder Nocken-Design sowie die Wahl der Kugellager gemäß dem erforderlichen Hub
• Typ des Encoders und Controllers passend zur benötigten Auflösung
• Maßliche Anpassungen für eine perfekte Übereinstimmung mit dem optischen Design
• Adapter für die präzise Positionierung feststehender Linsen
• Bälge für höchste Reinheit