Miniatur-Hexapod
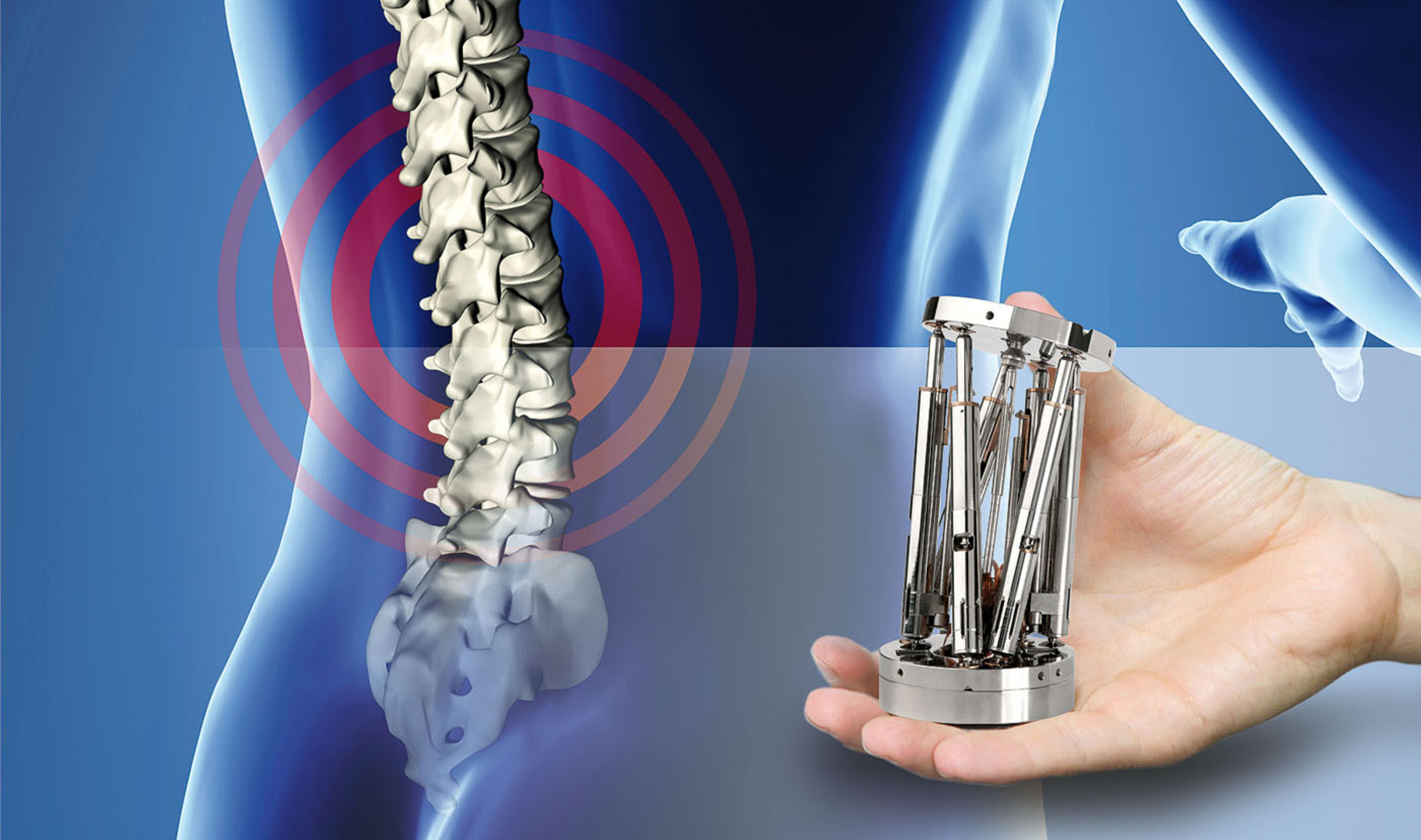
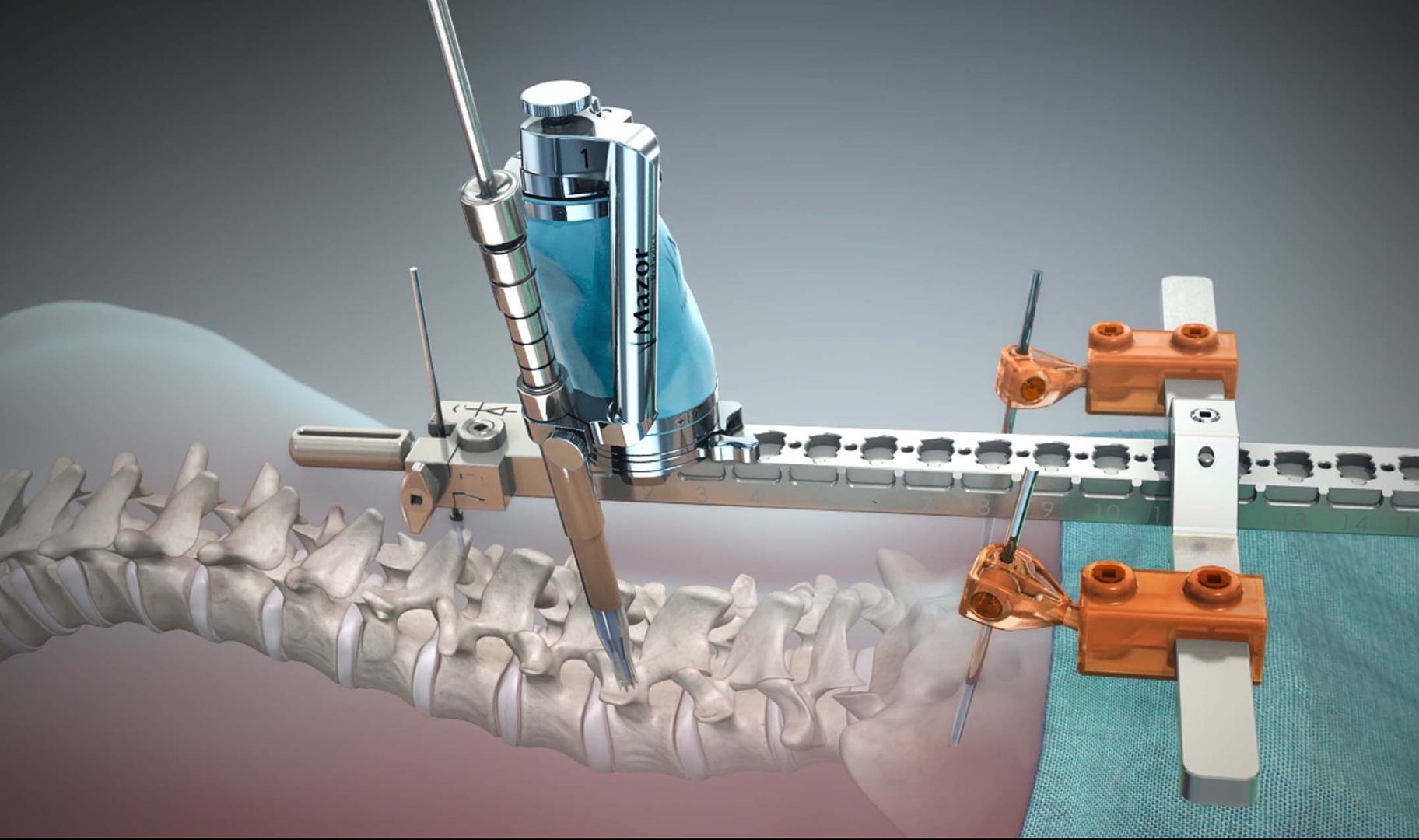
Das Platzieren von Pedikelschrauben oder anderen Implantaten in der Wirbelsäule erfordert Eingriffe von äußerster Präzision. Um das Risiko menschlicher Fehler zu reduzieren und minimalinvasive mikrochirurgische Techniken weiterzuentwickeln, hat ein Unternehmen ein neues Operationsverfahren mit einem Miniatur-Hexapod entwickelt. MPS Microsystems wurde mit der Herstellung des einzigartigen Mikroroboters beauftragt. Der Hexapod ist mit einem Durchmesser von 50 mm, einer Höhe von 80 mm und einem Gewicht von 330 Gramm der kleinste seiner Art auf dem Markt. Die einzigartige Struktur des Miniatur-Hexapods besteht aus 6 Linearaktuatoren.
| Höhe: | 80 mm |
| Durchmesser: | 50 mm |
| Gewicht: | 330 g |
| Stellweg: | x-y, ± 20 mm z, 15.3 mm |
| Winkel um x und y herum: | ±12 Grad |
| Winkel um z herum: | ±30 Grad |
Die Struktur des Miniatur-Hexapods umfasst 6 Linearaktuatoren, jeweils bestehend aus folgenden Komponenten:
Jeder Aktuator wird in einem geschlossenen Regelkreis betrieben und erreicht eine Positioniergenauigkeit von 1 Mikron bei einem Gesamtstellweg von 15.3 mm.