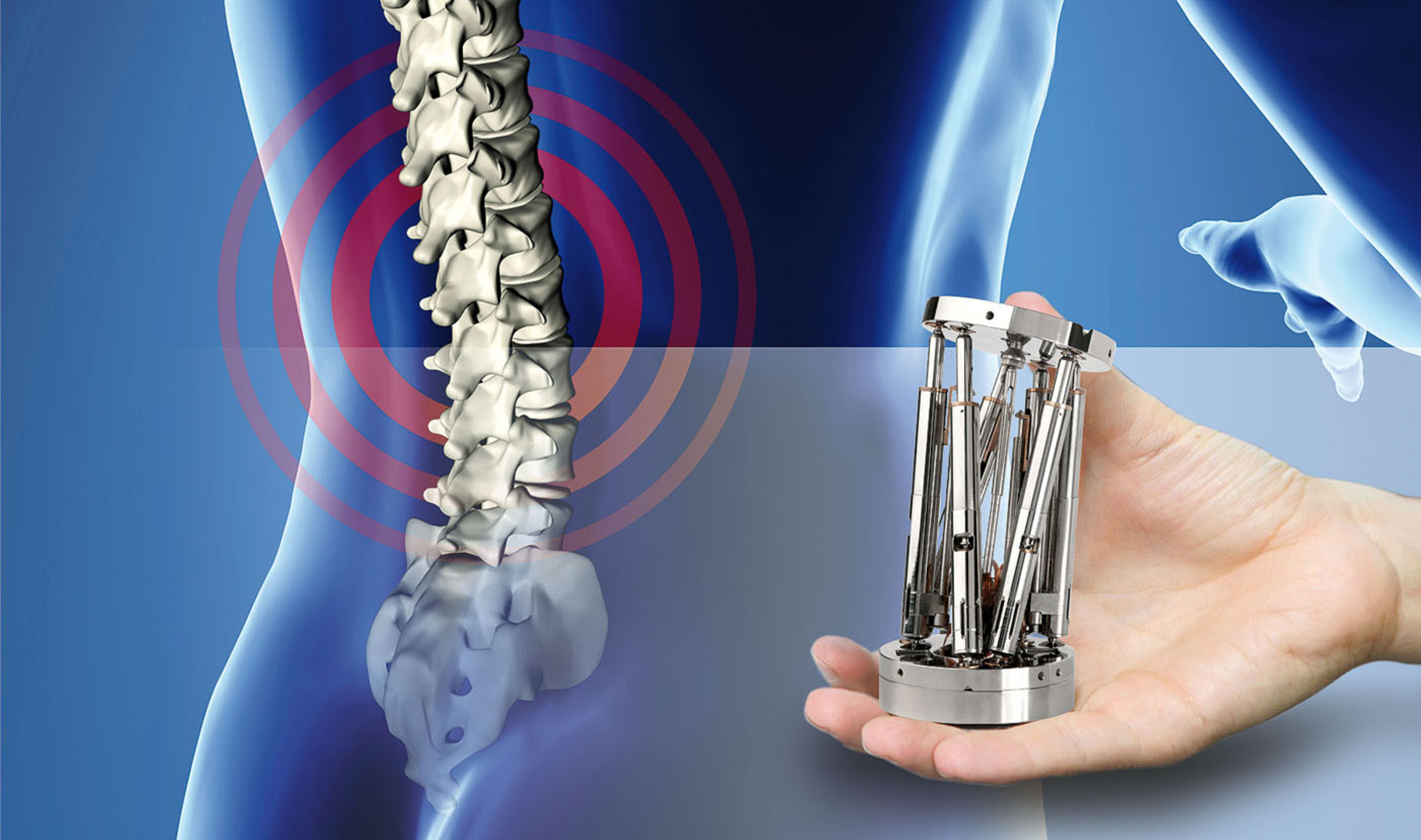
Miniature hexapod robot
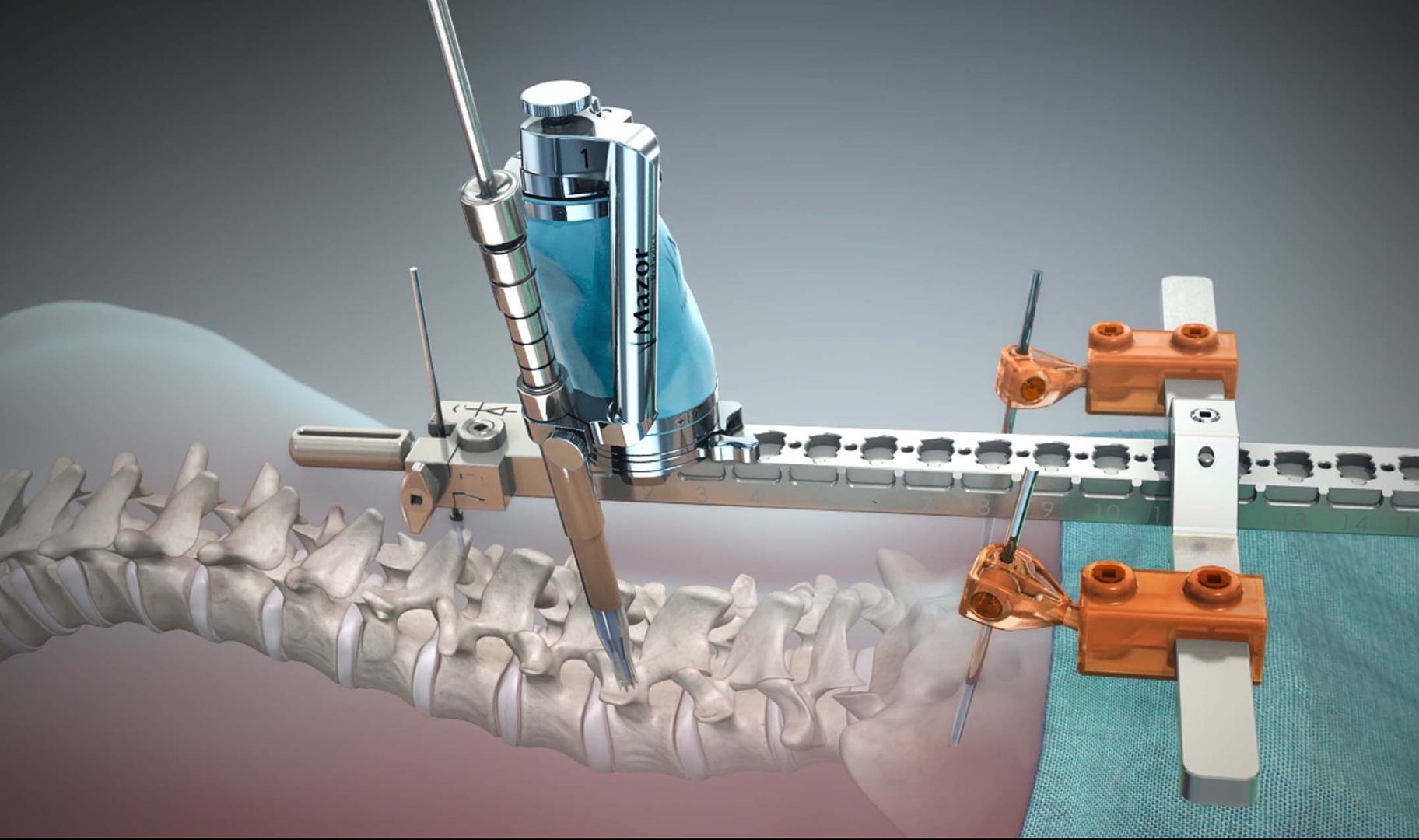
Fitting pedicle screws or other implants in the spinal column requires extremely precise surgical procedures. To reduce the risk of human error and to favor minimally invasive micro-surgery techniques, a company has developed a new operating procedure involving a miniature hexapod. It instructed MPS Microsystems to manufacture the micro robot. With a diameter of 50 mm, 80 mm in height and weighing 330 grams, this hexapod is the smallest on the market. The miniature hexapod has a unique structure comprising 6 linear actuators.
| Height: | 80 mm |
| Diameter: | 50 mm |
| Weight: | 330 g |
| Range: | x-y, ± 20 mm; z, 15.3 mm |
| Angle around x and y: | ± 12 degrees |
| Angle around z: | ± 30 degrees |
The structure of the miniature hexapod comprises 6 linear actuators, each made up of:
Each actuator, driven in closed loop, achieves a positioning accuracy of 1 micron over a total stroke of 15.3 mm.